
In ANSYS, a cylindrical coordinate system is defined by X, Y and Z axis as shown in Figure 1.
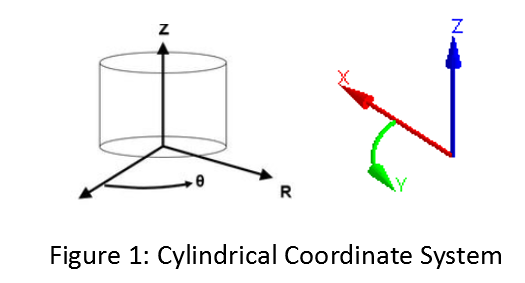
X and Z correspond to R and Z respectively. One would think that the Y axis is equivalent to theta. However, this is not true.
The following is an excerpt from ANSYS Mechanical User Guide:
“In a cylindrical coordinate system X, Y, and Z are used for R, Θ, and Z directions. When using a cylindrical coordinate system, non-zero Y displacements are interpreted as translational displacement quantities, ΔY = RΔΘ. Since they are treated as linear displacements it is a reasonable approximation only, for small values of angular motion ΔΘ.“
It is important to be aware of how Y axis is defined when working with cylindrical coordinate systems.
Limitation
There is no way to apply an acceleration to a cylindrical coordinate system in ANSYS Mechanical or APDL. This is documented in ANSYS help as follows:
“The global Acceleration boundary condition defines a linear acceleration of a structure in each of the global Cartesian axis directions.“
“Coordinate System: Drop-down list of available coordinate systems. Global Coordinate System is the default. When using cyclic symmetry, the referenced coordinate system must match coordinate system used in the Cyclic Region. For a 2D axisymmetric model the referenced coordinate system must be the Global Coordinate System. The referenced coordinate system must be Cartesian.“