INTRODUCTION
Contact stabilization damping is a feature associated with non-linear (frictionless, frictional, and rough) contacts in ANSYS. It can be accessed under the Advanced contact settings and can be entered as a numerical value. It is zero by default.

In this article we will discuss how to use this feature to “stabilize” challenging contact definitions and aiding in achieving solution convergence.
What is Contact Stabilization Damping?
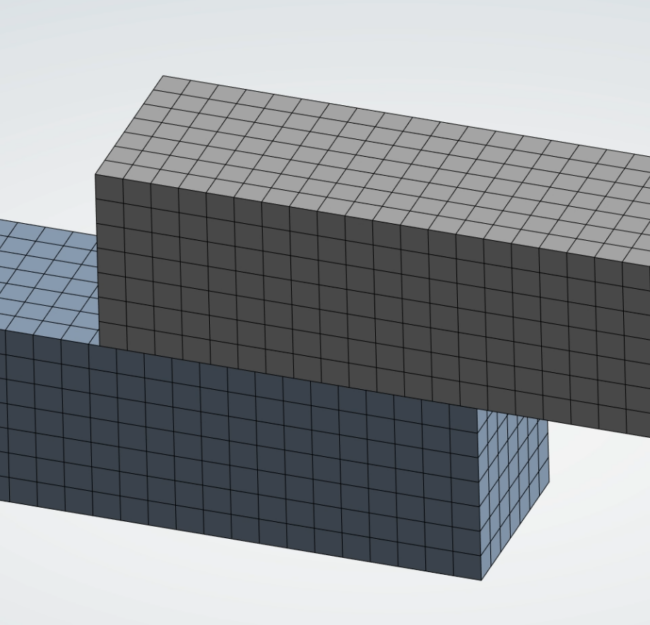
Consider the two bodies (Body A and Body B) shown in the image below. Suppose there is a frictional contact defined the OD of Body A (contact surface) and the Hold ID in Body B (target surface). Due to the gap between the contact and target surfaces we can expect that there will be relative motion between the two bodies. Depending on the applied loads, the relative motion could be large or “abrupt” enough to cause solution convergence difficulties.
The analyst may choose to modify the geometry to bring the parts close together. Another option could be to use “adjust to touch” for the contact interface treatment. Both these options would essentially eliminate the play between the two bodies. But in some cases, these options may not be valid since the gap between the two bodies may need to be modeled to represent the real life situation. This is where contact stabilization damping can be useful.
Contact stabilization damping introduces damping between the contact and target faces. This damping resists the relative motion between the two components via a damping force. This force is proportional to the velocities of the two bodies:
Fcontact_damping = C X (VB – VA)
You can think of contact damping as a viscous fluid filling the gap between the contact and target surfaces.
What value to use for the stabilization damping factor
The value chosen for the damping factor is arbitrary since contact stabilization has no physical bases. You could start with a value of 0.05 and see if the results are as desired. Some trial error may be needed to settle on an appropriate value.
Must be used carefully
Contact stabilization damping can be a useful tool to aid in convergence, but it must be utilized with caution.
If the damping force is too low the solution may still fail to converge. While this is not inherently problematic it does not fulfill the objective of achieving solution convergence.
If the damping force is too large the artificial damping may act as a highly viscous fluid, compromising the accuracy of the solution.
This is why it is important to remember that contact stabilization damping does not have a physical basis. It is only a numerical technique used to stabilize the system response.
Comparing stabilization energy to stiffness energy
If a structural analysis is solved with contact stabilization damping activated for one or more of the contacts in the system, it must be verified that the artificial energy contributed by the contact stabilization damping is significantly less than the strain energy in the system.
This is why it is a good practice to monitor and compare the contact stabilization and the stiffness energies of the system as the solution progressing.
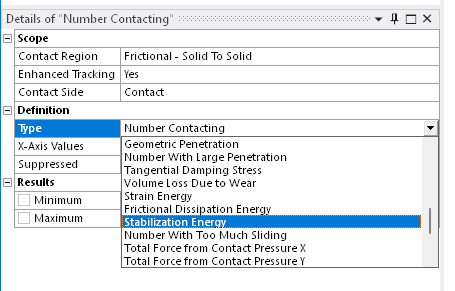
You can do this by right clicking on “solution information” and inserting “contact”.
Under details of the contact object, pick the appropriate contact region and under type pick “stabilization energy”.
You can then solve the simulation and once done, compare the plots for the two energies. You should confirm that the stabilization energy is “much lower” than the stiffness energy, ideally several order of magnitudes lower.