Introduction
We recently published an article covering the fundamentals of modal analysis. It is a good introduction for those who are new to modal analysis or want to learn its basics.
In this article, we will look into specific settings and options that are available in Ansys Workbench when performing a modal analysis.
Pre-Stress
As the name suggests a pre-stress analysis allows the user to perform a modal analysis on a geometry that is already stressed. Pre-stressed Modal analysis requires performing a Static Structural analysis first. In the modal analysis you can use the Initial Condition object to point to the Static Structural analysis to include pre-stress effects.
A common use of a Pre-Stress state is an assembly where the bolt pretensions have been applied and / or the effect of dead weight has been considered.
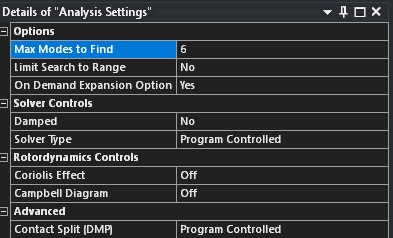
Analysis Settings
Options
Max Modes to Find
Specifies the number of natural frequencies to solve for in a modal analysis. The default value is 6. Set the property to zero (0) to specify a value of All (find all frequencies). In order to specify this value, you must set the Limit Search to Range property to Yes and then set the Solver Type explicitly to either Direct, Unsymmetric, or Subspace or when the Program Controlled option selects one of these solvers.
Limit Search to Range
Allows you to specify a frequency range within which to find the natural frequencies. The default is set to No. If you set this to Yes, you can enter a minimum and maximum frequency value. If you specify a range the solver will strive to extract as many frequencies as possible within the specified range subject to a maximum specified in the Max Modes to Find field.
On Demand Expansion Option
When the On Demand Expansion Option property is set to Yes, either manually or from the Program Controlled setting, the application creates the result file optimally. That is, the application evaluates the results using the Modal solution data and calculates any other results “on demand.” This improves solution performance and reduces file size.
If the application detects any of the following conditions, it automatically sets the On Demand Expansion property to No:
- The system is a standalone modal analysis (no downstream systems).
- You specify any Output Controls.
- A downstream system does not support an On Demand Expansion Option property setting of Yes.
- A downstream system has the On Demand Expansion Option set to either No or Program Controlled (No).
- Damping is present in the analysis.
- Symmetry present in the analysis.
When the On Demand Expansion Option property is set to Yes, either manually or from the Program Controlled setting, the application automatically changes the settings of the following properties to improve solution performance and reduces file size.
- The Store Modal Results property is set to No to reduce mode file size
- Solution files are not recombined when the Distributed solution option is active.
- Expansion Settings are suppressed because on demand expansion is done “on the fly” to plot displacement results on Condensed Parts.
Important:
- Response Spectrum, Random Vibration, and Structural Optimization analyses cannot be linked to an upstream Modal analysis that has the On Demand Expansion property set to Yes, either manually or from the Program Controlled setting.
- Stress and strain cannot be evaluated on Condensed Parts.
- Spring annotations do not update when viewing results.
- You can change the default setting of this property under the Options (Modal, Harmonic and Transient Mode Superposition) category of the Analysis Settings and Solution group in the Options dialog.
Solver Controls
Damped
Use this property to specify if the modal system is undamped or damped. Depending upon your selection, different solver options are provided. Damped by default, it is set No and assumes the modal system is an undamped system.
Solver Type
It is generally recommended that you allow the program to select the type of solver appropriate for your model in both undamped and damped modal systems.
The Direct, Iterative, Unsymmetric, Supernode, and Subspace types are used to solve a modal system that does not include any damping effects (the Damped property is set to No). Except for the Unsymmetric option, the solver types are intended to solve Eigen solutions with symmetric mass and stiffness. For a large model, the Iterative solver is preferred over the Direct solver for its efficiency in terms of solution time and memory usage.
- Direct solver uses the Block Lanczos extraction method that employs an automated shift strategy, combined with a Sturm sequence check, to extract the number of eigenvalues requested. The Sturm sequence check ensures that the requested number of eigen frequencies beyond the user supplied shift frequency (FREQB on the MODOPT command) is found without missing any modes. See the Block Lanczos help in the Eigenvalue and Eigenvector Extraction section of the Mechanical APDL Theory Reference.
- Supernode solver is recommended for extracting a large number of modes. Selecting Supernode as the Solver Type automatically sets the Limit Search to Range property to Yes in the Options category. This selection also displays the Range Minimum and Range Maximum properties and requires a Range Maximum frequency entry. Alternatively, you may reset the Limit Search to Range property to No to find all of the possible modes without any restrictions on the frequency range.
- Subspace solver (unlike the Direct solver) does not perform Sturm sequence check by default (STRMCK is OFF by default in SUBOPT command), making it relatively faster than Direct solver and also has reasonable accuracy. In addition, the Subspace solver supports distributed parallelism allowing you to take advantage of a distributed architecture to perform faster computations.
- Unsymmetric solver (for modal systems with unsymmetric mass and/or stiffness) is required for solving the Eigen solutions. See the Help for the MODOPT command in the Mechanical APDL Command Reference for more information about solver selection.
f the Damped property is set to Yes, the Solver Type property options include:
- Program Controlled (default)
- Full Damped
- Reduced Damped
The Reduced Damped solver is preferred over the Full Damped solver for its efficiency in terms of solution time. However, the Reduced Damped solver is not recommended when high damping effects are present because it can become inaccurate.
Retrodynamics Controls
Coriolis Effect
The options are to leave this off or On, Stationary Reference Frame
The Coriolis force is an inertial (or fictitious) force that acts on objects in motion within a frame of reference that rotates with respect to an inertial frame.
To account for the Coriolis Effect of rotational velocity applied in the Static analysis, you need to re-apply the rotational velocity in the Modal analysis.
Campbell Diagram
This option is used to insert a campbell diagram chart result. The Campbell diagram chart result is mainly used in rotor dynamics for rotating structural component design. When a structural component is rotating, an inertial force is introduced into the system. The dynamic characteristics of the structural component change as a result of the inertia effect, namely, gyroscopic effect. To study changes in dynamic characteristics of a rotating structure, more than one solve point in Rotational Velocity is required.
Advanced
Contact Split (DMP)
When the Contact Split (DMP) property is enabled, the contact conditions for the model are split during the distributed solution to generate several smaller contacts. These contacts are then processed across the available cores. Once the solution is complete, the split pairs are merged. This entire process is automatic. Property options include:
- Off: No contact splitting.
- Program Controlled (default): The application selects whether to perform contact splitting in order to improve performance.
- On: The application splits the contact regions during the solution. Selecting this option displays the additional property Max Number of Splits. This entry specifies the maximum number of splits that can occur for each contact region during the distributed solution. A minimum value of 2 is acceptable.
Note:
- When contact splitting is enabled, different contacts in the model can result in different levels of splitting. The level of splitting is determined by the application during run time.
- The use of this property may trim some of the contact elements during the solution. This reduces the number of contact elements compared to the original untrimmed contact condition. As a result, contact result items such as Contact Force Reactions and Contact Trackers may provide different results when you turn the Contact Split (DMP) property On compared to a solution with the property turned Off.